
Discover Our Focus
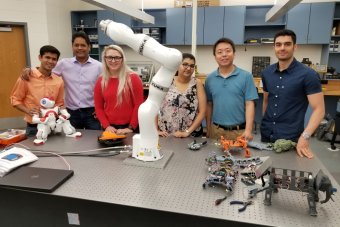
The Collaborative Robotics and Adaptive Machines Laboratory (CRAMlab) aims to make fundamental advances in the science and engineering of robotics with diverse applications in autonomous systems, advanced manufacturing, and healthcare. Ongoing projects include the development of novel underwater robotic platforms for ocean exploration tasks, swarming of aerial drones, bio-inspired jumping robotics for locomotion in lunar environments, robotic micro-drilling for manufacturing and medical applications, hand-held robots for specimen retrieval in minimally invasive surgery, and development of muscle-like actuators for applications in soft robotics.
Our research interests are:
-
Collaborative Robotics
-
Autonomous Systems
-
Swarm Intelligence
-
Bio-inspired Robotics
-
Medical Robotics
Explore Our Research
Bio-Inspired Robots Featured at First Maker Workshop for Veterans In a recent workshop at Old Dominion University, veterans applied 3D printing techniques to build robots that mimic some of these animal movements. (More)
- Book published in the area of swarm intelligence-based optimization. K. N. Kaipa and D. Ghose. Glowworm Swarm Optimization: Theory, Algorithms, and Applications, Studies in Computational Intelligence, Vol. 698, Springer-Verlag, 2017. ISBN: 978-3-319-51594-6 (Print) 978-3-319-51595-3 (Online).
- Best Paper Award. ASME Computer-Aided Product and Process Development Technical Committee's Prakash Krishnaswamy Best Paper Award, ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC/CIE), Cleveland, Ohio, USA, 2017.
- Outstanding Teaching Award. For the graduate course, Planning for Autonomous Robots, taught at the University of Maryland in spring 2016.
- K. N. Kaipa, A. S. Kankanhalli-Nagendra, N. B. Kumbla, S. Shriyam, S. S. Thevendria-Karthic, J. A. Marvel, and S. K. Gupta (2016). Addressing perception uncertainty induced failure modes in robotic bin-picking. Robotics and Computer Integrated Manufacturing 42(1), 17-38.
- C. W. Morato, K. N. Kaipa, and S. K. Gupta (2014). Toward safe human-robot collaboration by using multiple Kinects based real-time human tracking. ASME Journal of Computing and Information Science in Engineering, 14(1): 011006.
- C. W. Morato, K. N. Kaipa, and S. K. Gupta (2013). Improving assembly precedence constraint generation by utilizing motion planning and part interaction clusters, Computer-Aided Design, 45 (11): 1349-1364.
- K. N. Kaipa, J. C. Bongard, and A. N. Meltzoff (2010). Self-discovery enables robot social cognition: Are you my teacher? Neural Networks, Special Issue on Social Cognition: Babies to Robots, 23(8-9): 1113-1124.
- K. N. Kaipa and D. Ghose (2009). Glowworm swarm optimization for simultaneous capture of multiple local optima of multimodal functions. Swarm Intelligence, 3(2): 87-124.






- Kuka LBR iiwa Robot
- NAO Social Robot
- object 30 Prime 3D Printer
- GoScan 3D Scanner


A significant thrust in the CRAMlab is to pursue experimental robotics research with a strong belief that research of this nature immensely benefits from a rich mix of in-house robotics platforms designed/manufactured from scratch and customization of commercially available robots. To realize this dream, the CRAMlab is equipped with state-of-the-art equipment including the KUKA LBR IIWA collaborative robot, the Sawyer collaborative robot, the Dobot collaborative robot, the Nao social robot, Object 30 Prime 3D printer, Bamboo Labs 3D printer, Go-Scan 3D Scanner, Turtlebot mobile robots, Sphero robots, Festo’s Bionics4Education kits, and Hummingbird robotics kits.
-
MAE 336 Electromechanical Systems
-
MAE 431 Mechanisms—Design and Analysis
-
MAE 434W Senior Design Project - I
-
MAE 435 Senior Design Project - II
-
MAE 436 Systems—Dynamics and Control
-
MAE 495 Bio-inspired Robotics
-
MAE 740 Autonomous & Robotic Systems—Analysis and Control
"It was very fun," Takhvar said. "I built a robot that did not walk very well, to be honest, but I learned that engineering is more than just one discipline. It's a combination of multiple skills from different fields that you need to utilize to complete a job." - Navy Veteran Davis Takhvar
Contact
Interested in the Collaborate Robotics & Adaptive Machines Lab? Contact Dr. Krishnanand Kaipa.